
Un GPS pour enregistrer les déplacements de son cheval
Où va mon cheval quand je ne suis pas là? Combien de fois va-t-il boire chaque jour? À quel endroit passe-t-il le plus de temps? Le système GPS permet de répondre à ces questions. En plaçant un collier GPS sur son cheval, on peut le géolocaliser et obtenir ensuite une image comme celle ci-dessus. On peut alors savoir où il est allé et quelle distance il a parcouru. Le GPS est un outil de mesure très utile en sciences équines.
L’association vous prête un GPS
L’association a acheté plusieurs récepteurs GPS pour mener à bien le projet Hébergements et Déplacements. Nous avons donc plusieurs récepteurs GPS qui peuvent être empruntés par les membres de l’association.

Pour que vous puissiez utiliser au mieux les enregistreurs GPS que nous mettons à disposition dans l’association, voici un dossier complet sur le fonctionnement du GPS. Si vous n’avez pas le temps de tout lire, voilà ce qu’il faut retenir.
- Le GPS ne fonctionne que s’il voit le ciel

- Chaque récepteur GPS est caractérisé par son erreur systématique et son incertitude. Il faut tenir compte de cette erreur pour comparer les mesures réalisées avec 2 récepteurs GPS différents.
Le G-LOG 770 que nous utilisons pour le projet de l’association a :
- Une erreur systématique d’environ [latex] +0,3 [/latex]km par jour,
- Une incertitude d’environ [latex]\pm 0,1[/latex] km par jour.
[nextpage title= »Le système GPS »]
Le GPS est un système de géolocalisation (Global Positionning System) développé par les américains dans les années 1970. On utilise aujourd’hui l’acronyme GPS même quand les satellites utilisés sont Russes (projet GLONASS) ou européens (projet Galiléo).
Le système GPS est composé de 3 parties (appelées segments) :
- La constellation de satellites
- La base de commande des satellites
- Le récepteur GPS
La constellation de satellites
Pour se localiser dans l’espace, le récepteur GPS a besoin de recevoir le signal d’au moins 4 satellites. La constellation des satellites du système américain GPS est donc composée d’au moins 24 satellites en service de telle manière qu’en tout point du globe il y ait toujours au moins 4 satellites visibles dans le ciel.

Les satellites de la constellation GPS orbitent à 22 000 km de la surface de la Terre. Par comparaison, la Lune est à une distance d’environ 380 000km de la surface de la Terre et la station ISS est à 400km. Le signal émis par un satellite de la constellation GPS met moins d’un dixième de seconde à arriver au récepteur.
Chaque satellite envoie un signal différent des autres, ce qui permet au récepteur GPS de le reconnaître.
Le récepteur GPS
Le récepteur GPS est constitué de plusieurs éléments. De manière schématique, un enregistreur GPS est composé :
— D’une antenne
L’antenne permet de capter le signal envoyé par le satellite. Meilleure est l’antenne, meilleure est la qualité du signal.
— D’une carte d’acquisition qui récupère le signal venant de l’antenne.
La carte d’acquisition amplifie le signal et le transmet à une « puce ». Cette puce électronique fait des opérations de calcul sur le signal en combinant entre autres les informations provenant des différents satellites. Ces calculs permettent de déterminer la position du récepteur.
Les différentes puces électroniques ne font pas exactement les mêmes opérations. Les puces plus sophistiquées font des opérations plus complexes et ont en général une meilleure précision.
— D’une carte mémoire
La carte mémoire permet de stocker les données à la sortie de la puce électronique. La capacité de la carte mémoire limite le nombre de points qu’il sera possible d’enregistrer.
— D’une batterie
Le récepteur GPS a besoin d’une batterie pour faire fonctionner la carte d’acquisition et la puce électronique. La taille de la batterie conditionne l’autonomie du GPS. En général, plus la batterie est grosse, plus elle a une grande capacité de stockage d’énergie, et plus l’autonomie du récepteur est grande.
La base de commande des satellites
La base de commande des satellites sert principalement à contrôler que les satellites fonctionnent bien comme il le faut. Dans ce qui suit, nous allons détailler les deux parties qui sont nécessaires pour comprendre le fonctionnement du système GPS : la constellation de satellites et le récepteur GPS.
La taille du récepteur GPS est reliée :
- à la taille de son antenne : plus l’antenne est grande, meilleure est la réception
- à la taille de sa batterie : plus la batterie est volumineuse, plus son autonomie est grande
Pour déterminer où il se trouve, le récepteur GPS a besoin d’estimer sa distance à 4 satellites dont il reçoit le signal. Il estime ensuite sa position en faisant une opération de triangulation.
Connaître la distance entre le récepteur et un satellite
Le message du satellite
Régulièrement le satellite envoie un signal. Ce signal dit au récepteur GPS :
- De quel satellite il provient
- À quel instant il est parti (Tdépart)
- Sa position exacte.
Calcul de la distance au satellite
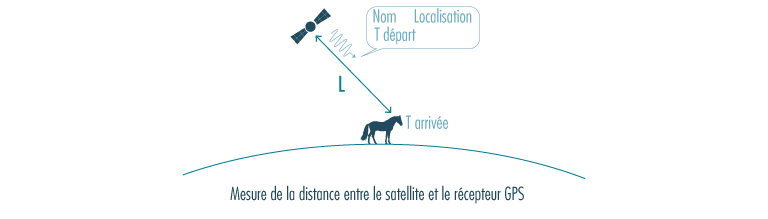
Lorsque le récepteur GPS reçoit le signal, il note son heure d’arrivée : Tarrivée
Le récepteur GPS peut alors calculer sa distance au satellite en utilisant la formule :
[latex]D= (T_{arrivee}-T_{depart} )\times c[/latex]
où c est la vitesse de la lumière et vaut environ 300 000 km/s.
Une erreur d’une nanoseconde ( 10-9 s) sur la mesure du temps de parcours entraîne une erreur de 30 cm. Une erreur d’une microseconde (un millionième de seconde) entraîne une erreur de 300 m.
Trouver sa position en connaissant la distance aux satellites
Pour trouver sa position, le récepteur GPS a besoin de connaître la position de 3 satellites et sa distance à chacun de ces satellites.
En effet, lorsque le récepteur connaît la position d’un satellite et sa distance D1 à ce satellite, il sait qu’il se trouve sur une sphère de rayon D autour du satellite. Lorsqu’il connaît la position de 2 satellites et sa distance à ces deux satellites, alors le récepteur GPS sait qu’il est à l’un des deux points d’intersection des deux sphères des positions possibles. Avec un troisième satellite, le récepteur GPS peut calculer sa position dans l’espace : à l’intersection des 3 sphères.
En pratique, comme l’horloge du récepteur GPS est beaucoup moins bonne que celle des satellites, il faut un quatrième satellite pour trouver la position du récepteur GPS.
Le récepteur GPS a besoin de recevoir le signal des satellites pour fonctionner correctement. Le récepteur GPS ne fonctionnera pas correctement s’il capte mal le signal des satellites, c’est-à-dire :
- En intérieur (dans une stabulation ou dans un box)
- Sous des arbres, en forêt
- Dans une vallée encaissée
Même lorsqu’il capte mal, le récepteur GPS donne une position! Il ne vous dira pas que dans cette situation l’erreur est beaucoup plus élevée que d’habitude (plusieurs dizaines de mètres d’erreur au lieu de quelques mètres d’erreur).
Comme tous les instruments de mesure, le récepteur GPS ne peut pas mesurer la position avec une précision infinie. En fait, il y a plusieurs raisons qui font que le GPS ne nous donne pas notre position exactement.
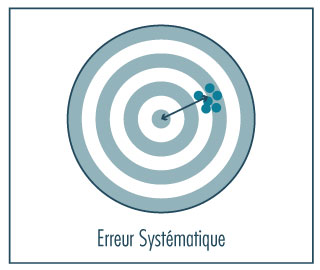
Erreur systématique
Une partie de l’erreur sur la mesure de la position ne varie pas d’une mesure à une autre. On peut la connaître en comparant le résultat de la mesure à une référence. C’est ce que l’on appelle l’erreur systématique. Une fois qu’on la connait, on peut la corriger.
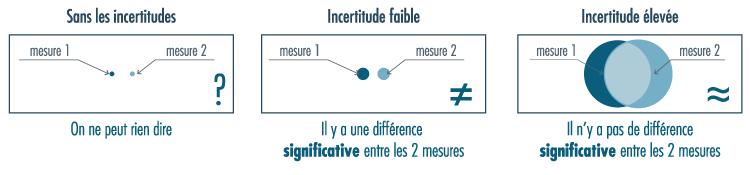
Incertitude
À l’inverse, il y a une partie de l’erreur qui soit varie d’une mesure à une autre soit que l’on ne peut pas connaître. On parle alors d’incertitude. Si l’incertitude sur la position est de 5 mètres, je sais que je suis quelque part dans un rayon de 5 mètres autour du point indiqué par le GPS.

Les différentes sources d’incertitude
Il y a en fait plusieurs sources d’incertitude sur l’estimation de la position du récepteur GPS.
- L’erreur due à l’incertitude sur la position du satellite ou sur l’instant d’émission du signal : ~2 m
- L’erreur due aux déviations du signal lors de son parcours dans l’atmosphère : ~ 5 à 10 m
- L’erreur due à la géométrie des satellites dans le ciel augmente les erreurs précédentes
Dans de mauvaises conditions d’utilisation, l’incertitude sur la position du GPS peut être de 100 mètres!
Dans le projet Hébergements et Déplacements, l’objectif de nos mesures est de pouvoir comparer des distances parcourues par des chevaux dans des hébergements différents. Mais pour comparer 2 mesures, il faut connaître l’incertitude associée à chaque mesure.
Erreur et incertitude sur la mesure de la distance parcourue
Nous avons vu qu’à chaque estimation de la position du récepteur GPS est associée une erreur systématique et une incertitude.

De la même manière, lorsque le récepteur va mesurer la distance totale qu’il a parcourue, il va faire une erreur systématique (il va toujours surestimer la distance parcourue). Même une fois que l’on aura corrigé cette erreur systématique, il y aura une incertitude sur le résultat de la mesure. On ne pourra pas savoir exactement qu’elle a été la distance parcourue par le cheval lors de la mesure.
Mesurer l’erreur systématique et l’incertitude sur son récepteur GPS
Nous allons maintenant voir comment mesurer l’erreur systématique sur la distance parcourue par le récepteur GPS et comment estimer l’incertitude associée à la mesure de la distance. En effet, l‘erreur systématique et l’incertitude dépendent du récepteur GPS choisi. Elles dépendent aussi du lieu et de la date à laquelle on fait les mesures, mais en France métropolitaine pour un modèle de récepteur donné, l’erreur systématique et l’incertitude sur le déplacement ne varient pas beaucoup.
Pour faire cette mesure, il suffit de laisser le récepteur GPS enregistrer sa position sans le changer de place pendant une journée. Pour traiter les données, il faut faire au moins 3 enregistrements différents d’une durée équivalente à celle sur laquelle vous voulez faire votre mesure définitive.
Pour faire le test du G-LOG 760, nous l’avons mis dans une pochette plastique et accroché à la clôture du pré dans lequel allaient être réalisées les mesures. Nous avons réalisés 5 enregistrements différents. Lorsque l’on visualise les enregistrements sur une carte, on obtient la figure suivante (l’échelle est en bas à droite) :

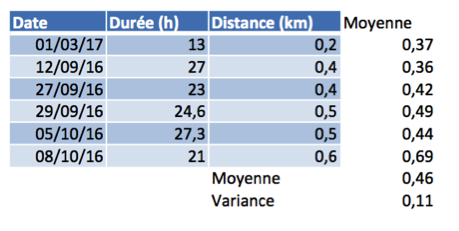
On calcule alors la distance parcourue sur chacun des enregistrements (par exemple avec l’application myGPSfiles). Par une règle de 3, on estime ensuite la distance parcourue sur 24 heures pour chacun des enregistrements. On peut alors faire le calcul de la moyenne et de la variance pour obtenir le tableau suivant :
Mesurer l’erreur systématique
L’erreur systématique du récepteur GPS, c’est la distance moyenne qu’il mesure alors qu’il reste immobile. Il s’agit de la moyenne des déplacements mesurés lorsque le GPS était statique. Dans le cas de l’exemple présenté en haut, l’erreur systématique est de 0,5 km par 24 heures de mesure.
L’incertitude sur la mesure de la distance
On voit sur les enregistrements présentés ci-dessus que le déplacement mesuré par le GPS lorsqu’il reste immobile n’est pas exactement le même d’une journée à l’autre. La variance est l’outil statistique qui permet d’estimer la dispersion des mesures réalisées. Dans l’exemple du G-LOG 760, la variance vaut 0,1 km. Cela signifie qu’une fois que l’on a retranché l’erreur systématique, l’incertitude sur la mesure de distance réalisée est de 0,1 km par 24 heures de mesures.
Chaque modèle de GPS possède une erreur systématique et une incertitude différente.
Une fois que l’on a estimé l’erreur systématique et l’incertitude, on peut dire que :
- La distance parcourue réelle est surestimée de l’erreur systématique (0,5 km/j pour le G-LOG 760)
- Une fois corrigée, la distance réelle est connue à l’incertitude près, c’est-à-dire à [latex]\pm 0,1[/latex] km/jour pour le G-LOG 760
Le système GPS permet aussi de mesurer la vitesse du récepteur à la surface de la Terre. Il y a deux manières d’effectuer cette opération :
- À partir du déplacement,
- En utilisant l’effet Doppler.
La première méthode est la plus simple, mais aussi la moins précise. Les bons récepteurs GPS estiment la vitesse à partir de l’effet Doppler.
Estimer la vitesse en connaissant 2 positions successives
La façon la plus simple de mesurer la vitesse du récepteur est de la calculer à partir des positions successives enregistrées. Si le récepteur GPS enregistre une position toutes les 5 secondes, alors la vitesse moyenne du récepteur pendant l’intervalle de temps entre ces deux points est égale à la distance entre les deux points divisée par 5 secondes.
[latex]V_{moy}=\frac{\mbox{distance entre deux points}}{\mbox{durée entre deux points}}[/latex]Si la distance mesurée entre deux points séparés de 5 secondes est de 10 mètres, alors la vitesse est de 2 m/s.
Cette estimation de la vitesse est d’autant plus précise que la durée entre deux mesures est petite.
Estimer la vitesse en utilisant l’effet Doppler
Il existe une autre méthode pour mesurer la vitesse du récepteur qui est basée sur l’effet Doppler. Cette méthode est plus complexe, mais elle est aussi beaucoup plus précise.
L’effet Doppler dans la vie de tous les jours
Dans la vie de tous les jours, on rencontre l’effet Doppler lors du passage d’une ambulance ou d’un camion de pompier, le bruit de la sirène n’est pas le même quand la voiture s’approche ou quand elle s’éloigne. La petite vidéo ci-dessous présente plusieurs expériences pour se rendre compte de l’effet Doppler.
Cet effet est du au fait que le son est une onde. La hauteur du son (plus ou moins aigue) est reliée à la fréquence du son, c’est-à-dire au nombre d’oscillations par secondes. Plus la fréquence est élevée, plus les oscillations sont rapides et plus le son est aigu. Et vice-versa.
L’effet Doppler sur l’onde émise par le satellite
Le signal émis par le satellite est aussi une onde. Il s’agit d’une onde électromagnétique, comme la lumière ou les ondes radio. Quand la distance entre le récepteur et le satellite change, c’est qu’il y a un mouvement. Le récepteur GPS reçoit alors un signal un tout petit peu différent de celui qu’il recevrait si la distance ne changeait pas.
En mesurant la différence entre le signal théorique (s’il n’y avait pas de mouvement), et le signal reçu, le récepteur GPS peut calculer sa vitesse par rapport au satellite. En faisant ce calcul pour chacun des satellites, le récepteur GPS peut calculer sa vitesse à la surface de la Terre.
[nextpage title= »Choisir un GPS »]Plusieurs dispositifs fonctionnent avec un récepteur GPS :
- Le récepteur GPS de navigation qui vous localise sur une carte.
C’est celui qui vous permet de trouver votre route en voiture ou en randonnée. - L’enregistreur GPS (GPS Logger) qui permet d’enregistrer un parcours.
C’est celui qu’on met au fond du sac à dos pour revoir son parcours le soir. C’est aussi souvent celui qui permet de taguer les photos avec le lieu où elles ont été prises. C’est ce type de récepteur GPS que l’on va utiliser dans l’étude « mesure de déplacements au pré ». - Le suiveur GPS (GPS tracker) qui permet de localiser depuis un ordinateur la position de l’objet ou de la personne qui a le GPS.
C’est ce type de GPS qui est vendu pour savoir où est son chien lors de la chasse ou bien pour suivre une flotte de véhicules. Ce dernier a besoin d’une carte SIM et d’un abonnement téléphonique (payant évidemment) pour pouvoir vous envoyer en temps réel les données que vous visualisez alors sur votre ordinateur.
Choisir un logger GPS
Pour le projet Hébergements et Déplacements, nous avions besoin :
- D’une autonomie d’au moins 24h,
- D’un récepteur robuste et qui résiste à l’eau,
- D’une erreur faible sur 24h,
Nous n’avions pas besoin de suivre en temps réel les chevaux, donc nous avons choisi un logger et non un tracker. Le cahier des charges que nous avions établi nous permettait de choisir le G-LOG 760 ou le G-LOG 770. Le IgotU a une erreur trop grande dès que l’enregistrement dépasse 2 h. Nous avons choisi le G-LOG 770 car il était plus récent que le 760. Le prix d’un G-LOG 770 est autour de 120€.
Il faut noter que seul le IGotU possède d’office un logiciel pour l’utiliser avec un mac. Les G-LOG doivent être utilisés avec un PC.
Nous avons été aidés dans notre choix par Mario de Weerd de la société Ynamics.